Autor: Horacio Nangullasmu
Fecha de Publicación: 3 may, 2023
El análisis dinámico paso a paso no lineal, es uno de los análisis que se puede aplicar a una estructura con sistemas de control de la respuesta sísmica. La no linealidad de la estructura se modela a través de elementos “General Link” de tipo de fuerza (figura 1), y el resto de la estructura se modela de forma elástica lineal. Por conveniencia, el primero se denomina sistema no lineal y el segundo se denomina sistema lineal. El análisis dinámico paso a paso no lineal se analiza convirtiendo las fuerzas de los miembros del sistema no lineal en cargas que actúan en el sistema lineal. Debido a que un sistema lineal se analiza mediante superposición modal, este enfoque tiene la ventaja de una velocidad de análisis rápida en comparación con el método de integración directa, que resuelve las ecuaciones de equilibrio para toda la estructura en cada paso de tiempo.
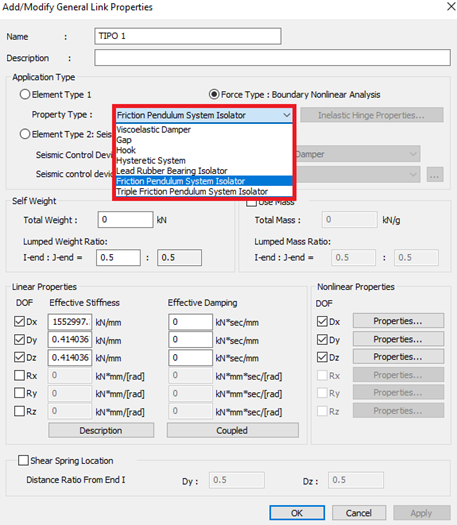
Figura 1. Cuadro de diálogo de los parámetros para los “general link” en midas Gen
La ecuación de movimiento para una estructura, que contiene elementos “General Link” de tipo de fuerza, es la siguiente:

donde,
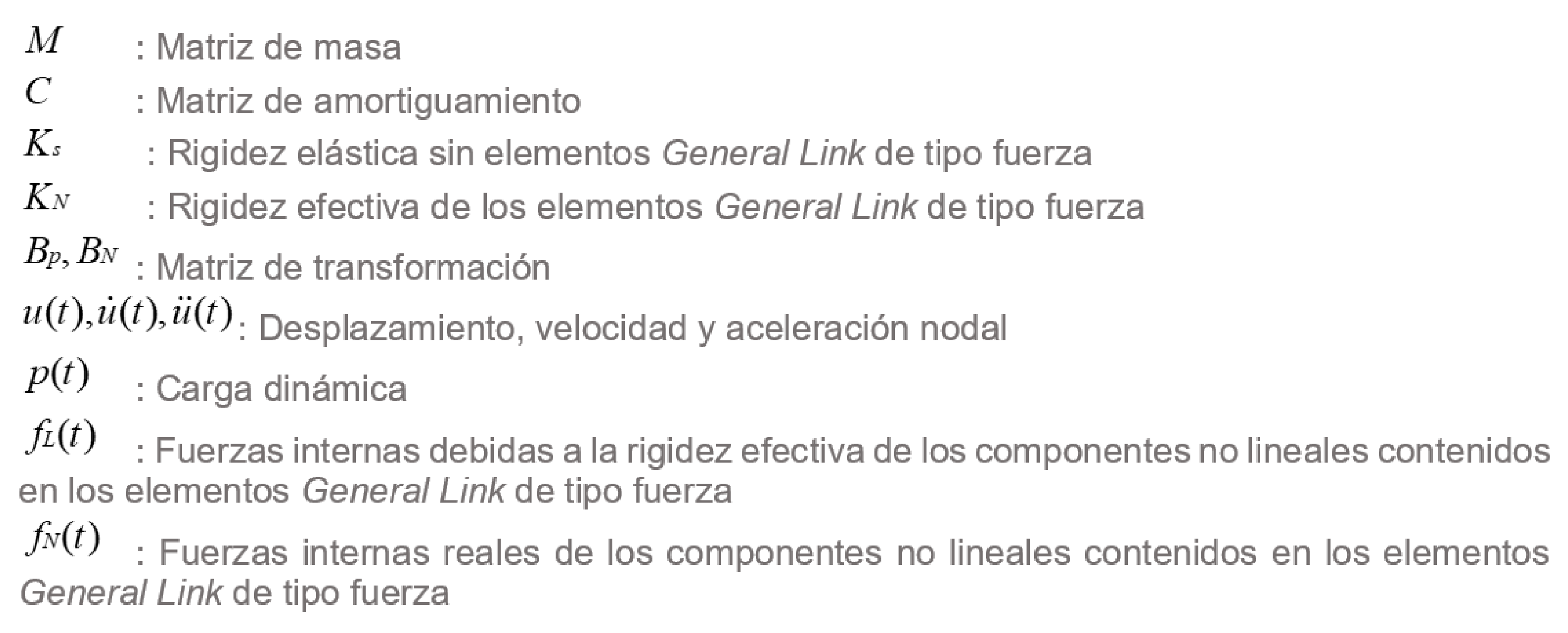
El término![]() en el lado derecho se cancela por las fuerzas nodales producidas por
en el lado derecho se cancela por las fuerzas nodales producidas por ![]() en el lado izquierdo, que corresponden a los componentes no lineales de los elementos General Link de tipo fuerza. Solo las fuerzas internas reales de los componentes no lineales
en el lado izquierdo, que corresponden a los componentes no lineales de los elementos General Link de tipo fuerza. Solo las fuerzas internas reales de los componentes no lineales ![]() afectarán el comportamiento dinámico. La razón para utilizar la matriz de rigidez efectiva
afectarán el comportamiento dinámico. La razón para utilizar la matriz de rigidez efectiva ![]() es que la matriz de rigidez
es que la matriz de rigidez ![]() por sí sola puede volverse inestable dependiendo de los puntos de conexión de los elementos General Link de tipo fuerza.
por sí sola puede volverse inestable dependiendo de los puntos de conexión de los elementos General Link de tipo fuerza.
Las formas modales y las frecuencias naturales sobre la base de matrices de masa y de rigidez se pueden calcular mediante el análisis de eigenvalores o por medio del análisis vectorial de Ritz. El amortiguamiento se considera mediante relaciones modales de amortiguamiento. Usando la ortogonalidad de los modos, la ecuación anterior se transforma en la ecuación de coordenadas modales de la siguiente manera:

donde,

Los parámetros ![]() y
y ![]() en el lado derecho de la ecuación están determinados por las deformaciones reales y la relación de cambio en las deformaciones en los sistemas de coordenadas locales de los elementos general link del tipo de fuerza correspondientes. Sin embargo, las deformaciones reales de los elementos contienen los componentes de todos los modos sin ser específicas en ningún modo en particular. Por lo tanto, no se puede decir que la ecuación cinética de coordenadas modales anterior sea independiente de los modos individuales. Con el fin de aprovechar al máximo el análisis modal, se asume en cada paso de tiempo del análisis a
en el lado derecho de la ecuación están determinados por las deformaciones reales y la relación de cambio en las deformaciones en los sistemas de coordenadas locales de los elementos general link del tipo de fuerza correspondientes. Sin embargo, las deformaciones reales de los elementos contienen los componentes de todos los modos sin ser específicas en ningún modo en particular. Por lo tanto, no se puede decir que la ecuación cinética de coordenadas modales anterior sea independiente de los modos individuales. Con el fin de aprovechar al máximo el análisis modal, se asume en cada paso de tiempo del análisis a ![]() y
y ![]() para que se convierta en una ecuación cinética en el sistema de coordenadas modal independiente.
para que se convierta en una ecuación cinética en el sistema de coordenadas modal independiente.
Primero, utilizando los resultados del análisis del paso inmediatamente anterior, se supone el desplazamiento modal generalizado y la velocidad del paso actual; en base a éstos, se calculan ![]() y
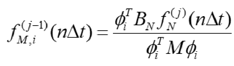
y ![]() para el paso actual. Nuevamente a partir de estos valores, se calculan el desplazamiento modal generalizado y la velocidad de la etapa actual. Las deformaciones y las tasas de cambio en las deformaciones de los elementos general link del tipo de fuerza se calculan a través de un proceso de combinación. Todo el proceso de cálculo se repite hasta que los siguientes errores de convergencia estén dentro de la tolerancia permitida.
para el paso actual. Nuevamente a partir de estos valores, se calculan el desplazamiento modal generalizado y la velocidad de la etapa actual. Las deformaciones y las tasas de cambio en las deformaciones de los elementos general link del tipo de fuerza se calculan a través de un proceso de combinación. Todo el proceso de cálculo se repite hasta que los siguientes errores de convergencia estén dentro de la tolerancia permitida.
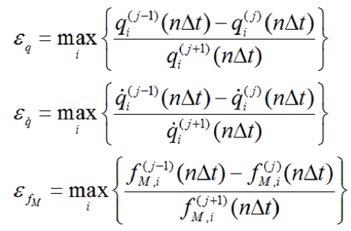
donde,
El proceso anterior se repite para cada paso de tiempo del análisis. El usuario especifica directamente el número máximo de repeticiones y la tolerancia de convergencia en los casos de carga dinámico paso a paso (figura 2). Si no se alcanza la convergencia, el programa subdivide automáticamente el intervalo de tiempo de análisis Δt y comienza a volver a analizar.
Las propiedades no lineales de los elementos general link del tipo fuerza se expresan en términos de ecuaciones diferenciales. Se requieren soluciones al análisis numérico de las ecuaciones diferenciales para calcular y corregir las fuerzas internas correspondientes a componentes no lineales en el proceso de cada repetición. Los programas MIDAS utilizan el método de análisis numérico Runge-Kutta Fehlberg (figura 2), que se usa ampliamente para ese propósito y se sabe que proporciona velocidad y precisión de análisis.
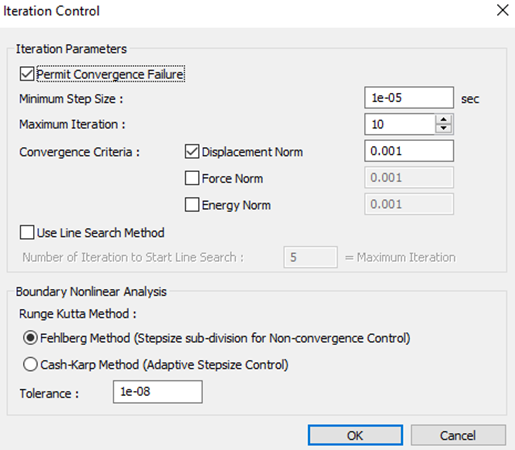
Figura 2. Control de iteraciones para análisis dinámicos paso a paso en midas Gen
Precauciones para el análisis modal
El análisis dinámico paso a paso no lineal con elementos de control de la respuesta sísmica en MIDAS se basa en el análisis modal y, como tal, se requiere una cantidad suficiente de modos para representar la respuesta estructural. Se requiere especialmente un número suficiente de modos para representar las deformaciones de elementos general link del tipo fuerza.
Un ejemplo representativo puede ser el caso del análisis de la respuesta sísmica de un aislador de un sistema de péndulo de fricción. En este tipo de aisladores, la fuerza interna de la componente de dirección axial del elemento es un factor importante para determinar el comportamiento de las componentes de dirección a corte. En consecuencia, a diferencia de otros análisis típicos de respuesta sísmica, los modos verticales juegan un papel importante. El número de modos debe ser suficiente para que la suma de las masas modales en la dirección vertical sea cercana a la masa total.
Cuando se utiliza el análisis modal con eigenvectores para lograr dicho objetivo, se puede requerir un gran número de modos. Esto puede conducir a un tiempo de análisis muy largo. Si se utiliza el análisis de vectores Ritz, las formas modales y las frecuencias naturales se pueden encontrar reflejando la distribución de las cargas dinámicas con respecto a cada grado de libertad. Esto nos permite incluir los efectos de modos superiores con un número relativamente pequeño de modos (figura 3).
Por ejemplo, en el caso de un aislador de sistema de péndulo de fricción, podemos seleccionar la aceleración del suelo en la dirección Z y los casos de carga estáticos relacionados con el peso propio de la estructura en el cuadro de diálogo de entrada de datos para el análisis de Vectores de Ritz (figura 3). Se pueden obtener frecuencias naturales y formas modales relacionadas principalmente con el movimiento vertical. En general, se sabe que el análisis de Vectores de Ritz proporciona resultados de análisis más precisos con una menor cantidad de modos en comparación con el análisis de eigenvectores.
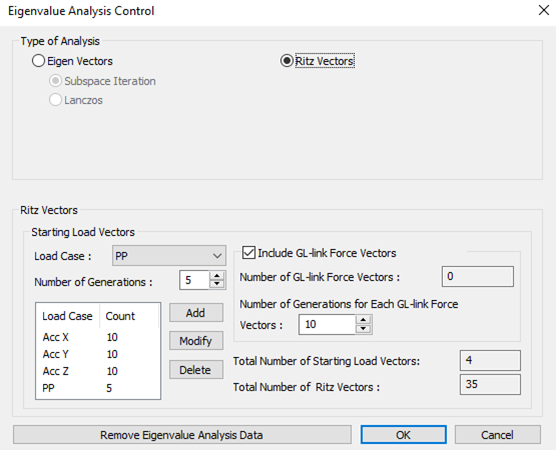
Figura 3. Control de análisis de eigenvalores en midas Gen
Combinación de cargas estáticas y dinámicas
A diferencia del análisis dinámico paso a paso lineal, el principio de superposición no se puede aplicar al análisis dinámico paso a paso no lineal. Los resultados del análisis de cargas estáticas y cargas dinámicas no pueden combinarse simplemente como si pudieran ocurrir simultáneamente. Para tomar en cuenta los efectos de las cargas estáticas y dinámicas simultáneamente, las cargas estáticas deben aplicarse en forma de cargas dinámicas, y luego se lleva a cabo un análisis dinámico paso a paso no lineal con elementos de control de la respuesta sísmica. MIDAS Gen proporciona la funcionalidad de cargas estáticas variables en el tiempo, que nos permite ingresar cargas estáticas en forma de cargas dinámicas (figura 4).
Primero, ingresamos la función de rampa del tipo normal en la función de fuerza dinámica. A continuación, podemos ingresar los casos de carga estática correspondientes a la dirección vertical y los nombres definidos previamente en la carga estática variable en el tiempo. La forma de la función de rampa debe ser tal que la carga estática convertida esté completamente cargada y la vibración resultante esté lo suficientemente amortiguada antes del tiempo de llegada de la aceleración del suelo (figura 4). Para reducir el tiempo que toma amortiguar la vibración resultante de las cargas estáticas convertidas a dinámicas, podemos seleccionar la opción de la relación de amortiguamiento inicial del 99% en Time History Load Case. Además, las cargas estáticas se mantienen mientras actúa la aceleración del suelo.
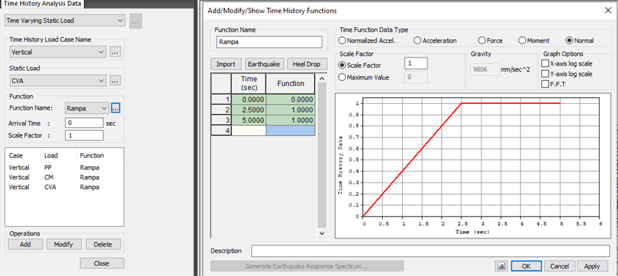
Figura 4 Carga estática vertical con variación en el tiempo
Rigidez efectiva
En un análisis dinámico paso a paso no lineal con sistemas de control de la respuesta sísmica, toda la estructura se divide en sistemas lineales y no lineales. Las fuerzas no lineales de los miembros estructurales que se derivan del sistema no lineal se convierten en cargas dinámicas externas que actúan sobre el sistema lineal para el análisis. En este punto, el sistema lineal solo puede volverse inestable dependiendo de las ubicaciones de los elementos general link del tipo de fuerza que comprende el sistema no lineal. Por lo tanto, el análisis modal se lleva a cabo después de estabilizar la estructura usando la rigidez efectiva.
Si la estructura se vuelve inestable después de eliminar los elementos general link del tipo de fuerza, se debe ingresar la rigidez efectiva adecuada para inducir las frecuencias naturales y las formas modales, que representan fielmente el verdadero comportamiento no lineal. La rigidez efectiva apropiada en este caso es generalmente mayor que 0, y se utiliza un valor menor o igual que el de la rigidez inicial de las propiedades no lineales (figura 5). La rigidez inicial corresponde a las propiedades dinámicas de los diferentes tipos de elementos que se tratarán en la última sección; es decir, kb para el Amortiguador Viscoelástico, k para Gap, Hook y Sistemas Histeréticos, y ky & kz para Aisladores elastoméricos de corazón de plomo y Aisladores de Péndulo de Fricción. La rigidez inicial se ingresa como rigidez efectiva para llevar a cabo un análisis estático lineal o un análisis dinámico lineal y obtener la respuesta antes de ejecutar el comportamiento no lineal. Para aproximar el análisis dinámico lineal, la rigidez secante apropiada se ingresa como rigidez efectiva sobre la base de la deformación máxima anticipada. Este es un intento de parecerse mucho al comportamiento de los elementos de resortes no lineales en un análisis no lineal. Si los resultados del análisis no convergen, podemos ajustar la rigidez efectiva para la convergencia.
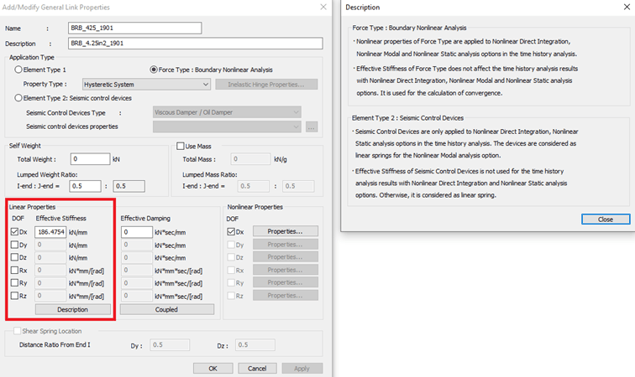
Figura 5. Rigidez efectiva de elementos General Link
Propiedades dinámicas de elementos resorte no lineales de tipo de fuerza
MIDAS proporciona 6 elementos de resorte no lineales para el análisis dinámico paso a paso no lineal con sistemas de control de la respuesta sísmica: amortiguador viscoelástico, gap, hook, sistema histerético, aislador elastomérico de corazón de plomo y aislador de sistema de péndulo de fricción. Sus propiedades dinámicas se describen a continuación.
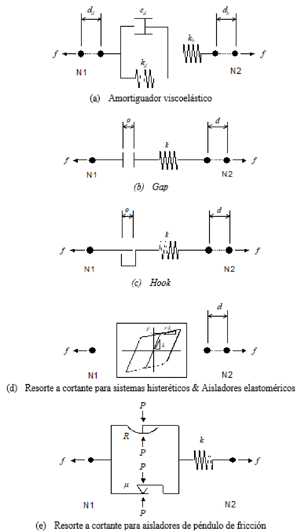
Figura 6. Diagramas conceptuales de resortes para elementos general link no lineal
Amortiguador Viscoelástico
El amortiguador viscoelástico retiene simultáneamente la viscosidad, lo que induce una fuerza proporcional a la velocidad de deformación; y elasticidad, que induce una fuerza proporcional a la deformación. El dispositivo aumenta la capacidad de amortiguamiento de la estructura y, por lo tanto, reduce la respuesta dinámica debido al sismo, viento, etc. El propósito de usar el dispositivo es mejorar la seguridad estructural y la capacidad de servicio (figura 7).
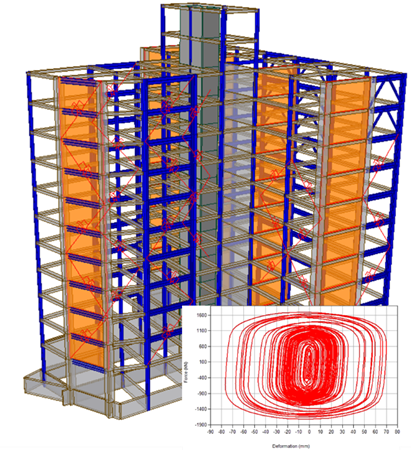
Figura 7. Aplicación de edificio con amortiguadores viscoelásticos
Los modelos matemáticos representativos del amortiguador viscoelástico son el modelo de Maxwell, que conecta en serie un resorte lineal y un amortiguador viscoso; y el modelo de Kelvin, que conecta ambos corriendo en paralelo entre sí. MIDAS Gen permite modelar la rigidez del elemento resorte usando el amortiguador viscoso y los resortes de los dos modelos ingresando las variables apropiadas.
El concepto de amortiguador viscoelástico se ilustra en la figura 6(a). Toma la forma del modelo de Kelvin de un resorte lineal y un amortiguador viscoso conectados en paralelo además de un arriostramiento con una rigidez lineal que conecta dos nodos. Si no está presente un elemento de conexión, o si la rigidez del elemento de conexión es sustancialmente mayor que la del dispositivo de amortiguamiento, el elemento de conexión puede definirse como un cuerpo rígido.
La relación fuerza-deformación del elemento es la siguiente:
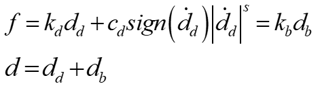
donde:
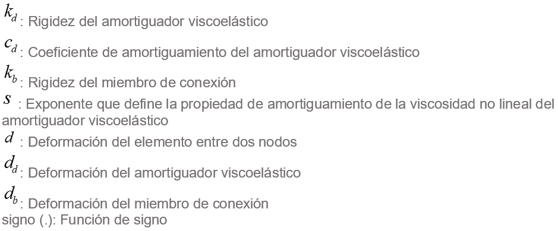
A partir de las ecuaciones anteriores, podemos modelar el amortiguamiento de la viscosidad linealmente proporcional a la tasa de cambio en la deformación, así como el amortiguamiento de la viscosidad no lineal exponencialmente proporcional a la tasa de cambio en la deformación. Si deseamos modelar un amortiguador viscoelástico con el modelo de Maxwell, simplemente ingresamos 0 para kd y especificamos la rigidez kb solo para el miembro de conexión (figura 8).
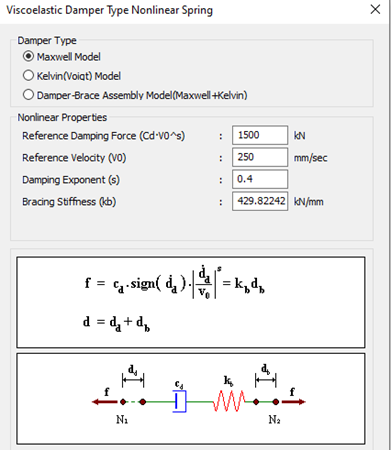
Figura 8. Propiedades no lineales para amortiguadores viscoelásticos
Gap
Al igual que otros elementos de control de la respuesta, el elemento Gap consta de 6 resortes. Se pueden representar las deformaciones del nodo N2 con respecto al nodo N1 para los 6 grados de libertad en el sistema de coordenadas del elemento (SCE). Si los valores absolutos de las deformaciones relativas negativas se vuelven mayores que los espacios iniciales en los resortes, se activarán las rigideces de los resortes correspondientes. El resorte en la dirección axial solo se puede usar para representar el elemento de solo compresión, que se usa para modelar problemas de contacto.
Los 6 resortes son independientes entre sí y conservan la siguiente relación fuerza-deformación:
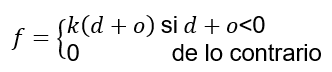
donde,
Hook
Al igual que otros elementos de control de la respuesta, el elemento Hook consta de 6 resortes. Se pueden representar las deformaciones del nodo N2 con respecto al nodo N1 para los 6 grados de libertad en el sistema de coordenadas del elemento (SCE). Si los valores absolutos de las deformaciones relativas positivas se vuelven mayores que las distancias de deslizamiento iniciales en los resortes, se activarán las rigideces de los resortes correspondientes. El resorte en la dirección axial solo se puede usar para representar el elemento de solo tensión, que se usa para modelar componentes tales como arriostramientos ante viento, elementos de gancho, etc.
Los 6 resortes son independientes entre sí y conservan la siguiente relación fuerza-deformación:
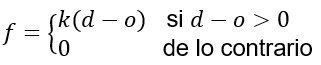
donde,
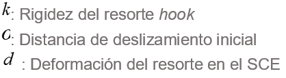
Sistema Histerético
El sistema histerético consta de 6 resortes independientes que tienen las propiedades de plasticidad uniaxial. El sistema se utiliza para modelar el dispositivo de disipación de energía a través del comportamiento histerético. Generalmente, se modelan amortiguadores metálicos de fluencia inelástica, que se utiliza para proteger la estructura primaria al deformar plásticamente el sistema de control. El dispositivo antes mencionado, es relativamente más rígido que la estructura primaria pero tiene un límite de fluencia menor (figura 9).
Figura 9. Propiedades no lineales para sistemas histeréticos
La relación fuerza-deformación del sistema histerético es la siguiente:
![]()
donde,
z es una variable histerética interna, cuyo valor absoluto va de 0 a 1. El comportamiento dinámico de la variable z fue propuesto por Wen (1976) y definido por la siguiente ecuación diferencial:
donde,

α y β son los parámetros que determinan el comportamiento post-fluencia. α+β >0 significa el ablandamiento sistema, mientras que α+ β<0 significa el endurecimiento sistema. La disipación de energía debida al comportamiento histerético aumenta con el aumento del área cerrada confinada por la curva histerética. En el caso ablandamiento del sistema, aumenta con la disminución del valor de (β-α). El cambio de comportamiento histerético debido a la variación de α y β se ilustra en la figura 10.
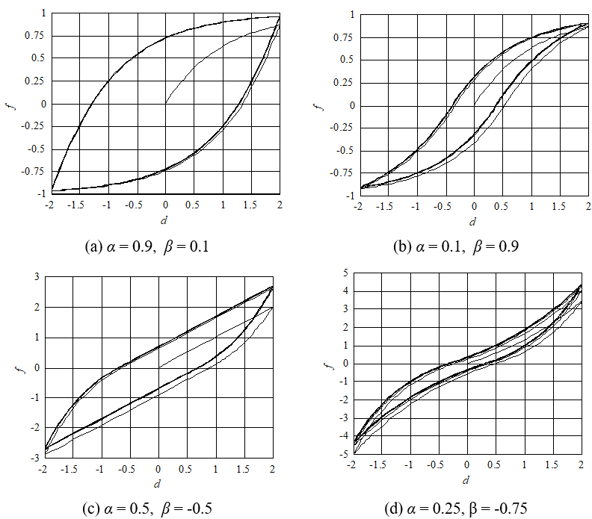
Figura 10. Relación fuerza-deformación por comportamiento histerético (r = 0, k = Fy = s = 1.0)
s es un exponente que determina la definición de la curva histerética en la región de transición entre la deformación elástica y la deformación plástica, es decir, en la región del límite elástico. Cuanto mayor sea el valor, más claro se vuelve el punto de límite elástico y más cerca está del sistema elastoplástico bilineal ideal. El cambio de la región de transición debido a s se ilustra en la figura 11.
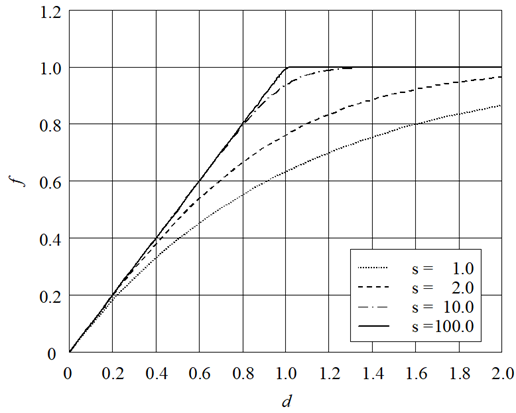
Figura 11. Región de transición entre deformaciones elásticas y plásticas (región de fluencia)
Aisladores Elastoméricos con núcleo de plomo
El aislador elastomérico con núcleo de plomo reduce la transmisión de la aceleración desde el suelo y, por lo tanto, protege la estructura del movimiento sísmico. Los aisladores se colocan entre las vigas y los cabezales de los puentes, y entre los cimientos y la superestructura para edificios (figura 12). El aislador elastomérico con núcleo plomo de baja rigidez postfluencia, separa las frecuencias naturales dominantes de la estructura de los componentes de frecuencia principales del movimiento del suelo. El aislador disipa la energía de vibración dentro del dispositivo a través del comportamiento histerético.
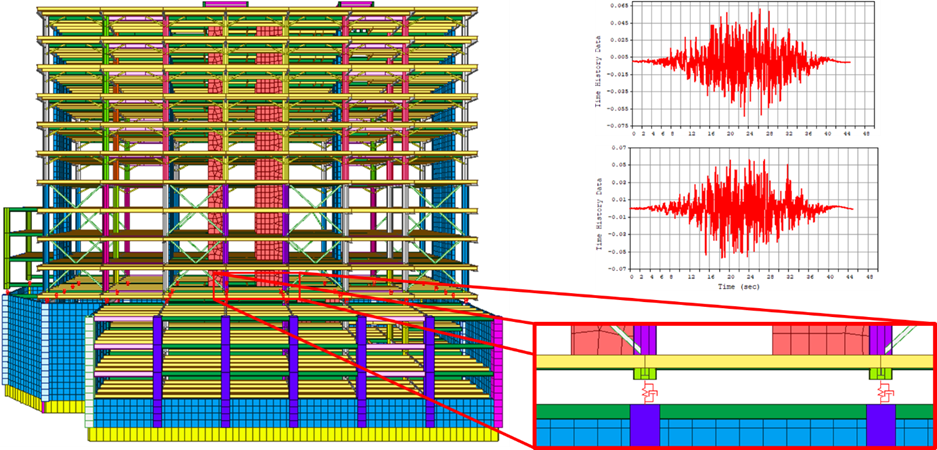
Figura 12. Modelo estructural con aisladores de base
Este tipo de aislador conserva las propiedades de plasticidad biaxial acoplada para las 2 deformaciones de cortante y las propiedades de resortes elásticos lineales independientes para las 4 deformaciones restantes.
La relación fuerza-deformación acoplada para un aislador elastomérico con núcleo de plomo se indica a continuación.
donde,
Cada uno los parámetros zy y zz es una variable histerética interna. La raíz de la suma de los cuadrados de ambos valores varía de 0 a 1. El comportamiento dinámico de la variable z se basó en el modelo de plasticidad biaxial propuesto por Park, Wen y Ang (1986), que fue ampliado a partir del modelo de plasticidad uniaxial de Wen (1976) y están definidos por la siguiente ecuación diferencial:
donde,

Si solo existe un resorte a corte no lineal, el modelo anterior se vuelve idéntico al sistema histerético con s = 2, en cuyo caso los propósitos de todas las variables y parámetros también se vuelven idénticos.
Aislador de péndulo de fricción
El aislador de péndulo de fricción se utiliza con el mismo propósito que el aislador elastomérico con núcleo de plomo. Su mecanismo de proteger la estructura del movimiento del suelo a través de la disipación de energía mediante el comportamiento histerético y el movimiento de las frecuencias naturales es idéntico. La diferencia es que el sistema de péndulo de fricción incurre en fuerzas de recuperación a través de los radios de curvatura de las superficies de deslizamiento del péndulo (figura 13). Al ajustar los radios, podemos mover las frecuencias naturales de la estructura global a los valores deseados. Además, la disipación de energía debido al comportamiento histerético se logra mediante el fenómeno de deslizamiento de la superficie.
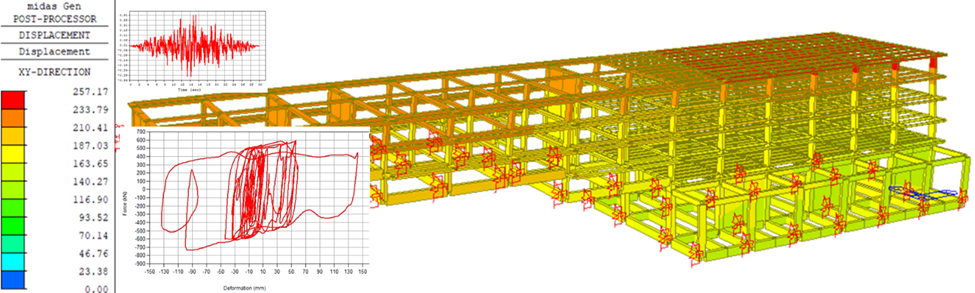
Figura 13. Modelo estructural con aisladores de base del tipo péndulo de fricción
Este tipo de aislador conserva las propiedades de Plasticidad Biaxial acoplada para las 2 deformaciones cortantes, la propiedad no lineal de comportamiento Gap para la deformación axial y las propiedades de resortes elásticos lineales independientes para las 3 deformaciones rotacionales restantes.
La ecuación de la relación Fuerza-Deformación del resorte axial del aislador de péndulo de fricción es idéntica a la del elemento Gap con un valor inicial de 0.
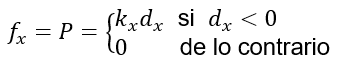
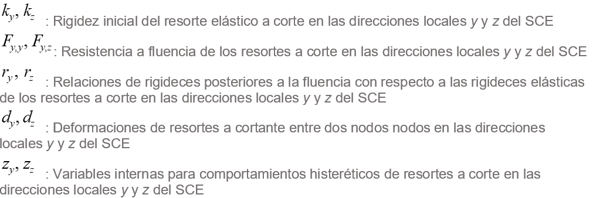
donde,

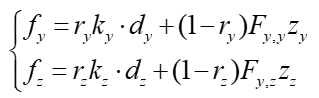
La relación fuerza-deformación acoplada para los resortes en las direcciones a corte para un aislador de péndulo de fricción se indica a continuación.

donde,
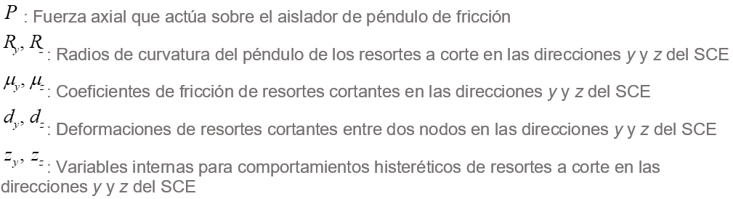
Los coeficientes de fricción de las superficies de fricción μy y μz dependen de las velocidades de deformación en las direcciones a corte, y están determinadas por las ecuaciones propuestas por Constantinou, Mokha y Reinhorn (1990).
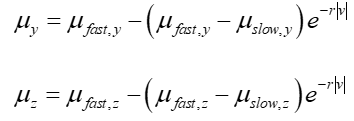
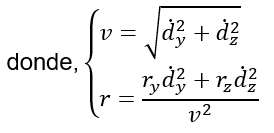
donde,
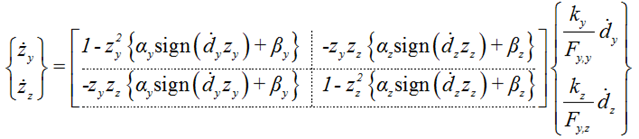
Cada uno de los parámetros zy y zz es una variable histerética interna. La raíz de la suma de los cuadrados de ambos valores varía de 0 a 1. El comportamiento dinámico de la variable z se basó en el modelo de plasticidad biaxial propuesto por Park, Wen y Ang (1986), que fue ampliado a partir del modelo de plasticidad uniaxial de Wen (1976). Están definidos por la siguiente ecuación diferencial:
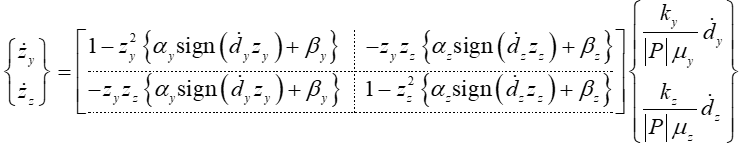
donde,

El modelo anterior conserva la forma idéntica que el aislador elastomérico con núcleo de plomo, excepto por el hecho de que los valores correspondientes a los límites de fluencia se expresan por los productos del valor absoluto de la fuerza axial y los coeficientes de fricción. Si solo existe un resorte cortante no lineal, el modelo anterior se vuelve idéntico a la propiedad uniaxial con s = 2.

Te invitamos a conocer todo nuestro equipo de ingenieros


Agregar Comentario: